ASkDAgger
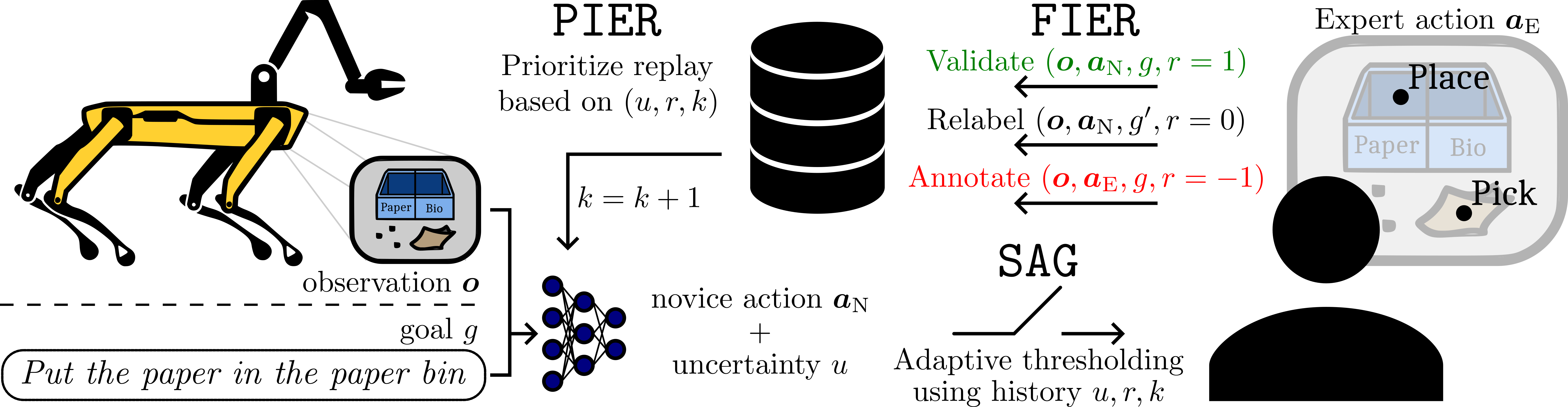
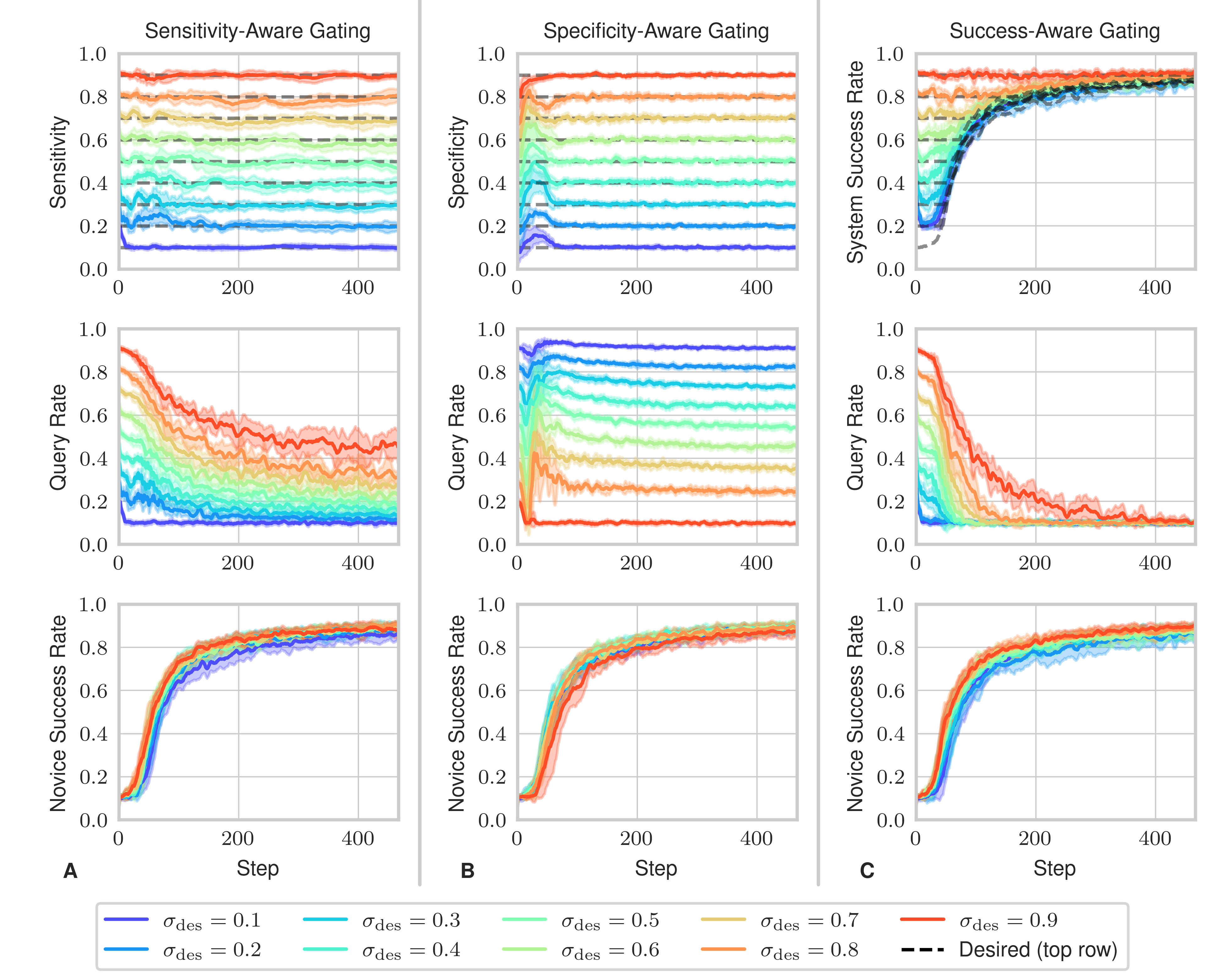
The Active Skill-level Data Aggregation (ASkDAgger) framework consists of three main components: S-Aware Gating (SAG), Foresight Interactive Experience Replay (FIER), and Prioritized Interactive Experience Replay (PIER). In this interactive imitation learning framework, we allow the novice to say: "I plan to do this, but I am uncertain." The uncertainty gating threshold is set by SAG to track a user-specified metric: sensitivity, specificity, or minimum system success rate. This facilitates the trade-off between queries and failures. Teacher feedback is obtained with FIER, enabling demonstrations through validation, relabeling, or annotation demonstrations. Lastly, PIER prioritizes replay based on novice success, uncertainty, and demonstration age.
Since ASkDAgger relies on the novice communicating its planned actions for teacher feedback, the method is most practical for moderate feedback frequencies. ASkDAgger therefore targets mid- to high-level control tasks rather than end-to-end policy learning. It is most applicable in scenarios where a robot has access to predefined parameterizable skills such as grasping, walking, pushing, door opening, screwing, or inserting. In such cases, the robot novice needs to learn the parameters and affordances of these skills given a user-specified command. When querying the teacher, the robot novice can specify which skill they plan to use, along with the parameterization of that skill. If the teacher deems the novice's plan invalid, they can provide a demonstration by annotating the appropriate skill and its parameters. For example, a pick skill can be parameterized by a Cartesian pick position and orientation.